Ultimamente nel sito UniverseToday è apparso un articolo molto interessante in cui si parla del fatto che le future sonde spaziali dirette verso gli asteroidi, dovranno essere in grado di funzionare in autonomia, senza essere guidate dal centro di controllo : questa necessità nasce da considerazioni relative a fattori molto importanti, tra i quali il numero di queste sonde in volo e la necessità di non impegnare più di tanto i centri di controllo per comunicare comandi e ricevere i dati forniti dalle singole sonde.
Lascio perciò la parola ad Andy Tomaswick ed al suo articolo, che come sempre traduco in modo ragionato e non certo automatico, grazie alla mia IP (Intelligenza Personale), e soprattutto arricchendolo con altri dati, informazioni e immagini : già il titolo dell’articolo è tutto un programma, praticamente metà articolo…
Se vogliamo visitare ancora più asteroidi, dobbiamo far sì che le sonde pensino autonomamente
Recentemente gli asteroidi sono stati visitati da parecchie sonde spaziali : come non ricordare fra le tante, la sonda Rosetta verso la cometa 67P/Churyumov-Gerasimenko, (ndr: quella a forma di paperella ), la OSIRIS-Rex verso l’asteroide Bennu ed oltre e la giapponese Hayabusa2 verso l’asteroide Ryugu , le quali ultime due hanno raccolto campioni del suolo roccioso per riportarli sulla Terra.
Ma dal momento in cui si avrà la necessità di raggiungere molti più asteroidi, si dovrà aumentare la larghezza di banda per la ricetrasmissione di messaggi.
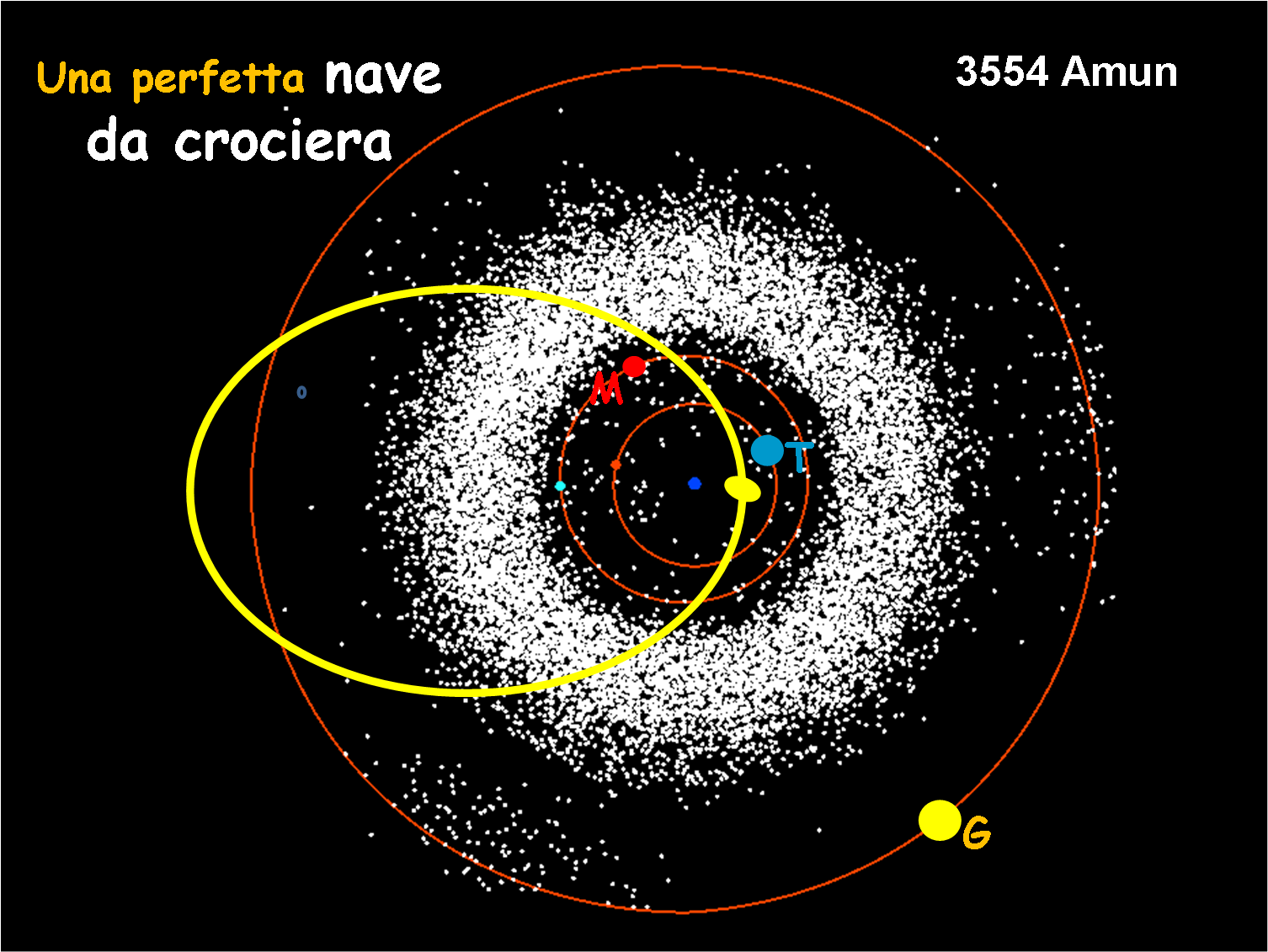
Lassù ci sono decine di migliaia di asteroidi nelle vicinanze della Terra, alcuni dei quali come sappiamo potrebbero presentare un pericolo per il nostro pianeta : se le agenzie spaziali lanciassero una sonda per raccogliere i dati di ognuno di questi asteroidi, ben presto le comunicazioni interplanetarie crescerebbero a dismisura e le infrastrutture di controllo sarebbero presto sopraffatte da una mole enorme di dati.
A questo problema cerca di dare soluzione uno studio recente da parte della Federal University of São Paulo e del Brazil’s National Institute for Space Research.
Primo problema
Lo studio si basa principalmente sul problema di controllare la singola sonda quando si trovi in fase di avvicinamento al proprio obiettivo, un nuovo asteroide.
Attualmente le missioni volano per parecchi mesi solo per avvicinarsi all’asteroide e nel momento cruciale richiedono un costante feedback da parte dei team scientifici per essere sicuri che la sonda interpreti al meglio i parametri relativi all’asteroide, in particolare i dati legati alla gravità.
Alcune missioni hanno avuto maggiore o minore successo rispetto ad altre, in base a questo criterio fondamentale.
In particolare il lander Philae, rilasciato dalla sonda Rosetta per atterrare sul suolo ricco di massi della cometa 67P/Churyumov-Gerasimenko, ha avuto parecchi problemi nella fase di atterraggio rimbalzando più volte ed andandosi a perdere in un anfratto senza possibilità di comunicare né con la sonda né tantomeno col centro di controllo. Come hanno sottolineato gli autori dello studio, questa difficoltà insormontabile era derivata dal fatto che la cometa ha una forma completamente differente da quella osservata con difficoltà dai telescopi terrestri prima dell’arrivo.
La Cometa 67P/Churyumov-Gerasimenko
Come sappiamo dai tanti articoli apparsi nel nostro sito e soprattutto dalla vasta eco nella stampa specialistica e non, con coinvolgimento fin da subito di bambini e scolaresche, la cometa aveva un aspetto decisamente lontano da quello stereotipato di una specie di roccia a forma di patata bitorzoluta e piena di rocce:
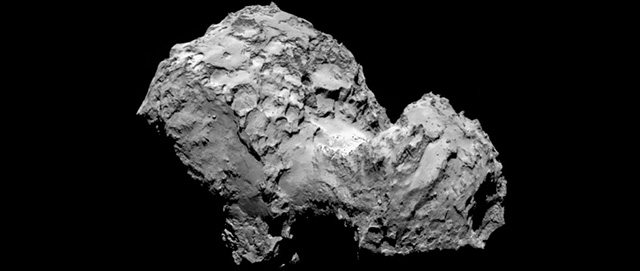
da questo suo aspetto era stata da subito riconosciuta come una paperella, ma osservandola da altri punti di vista, di taglio
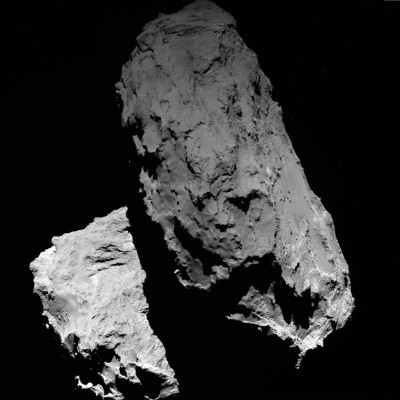
e da più vicino
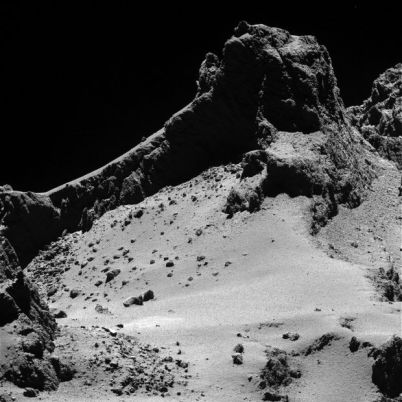
era da subito apparsa di una forma molto complessa : in un oggetto così strutturato, sia l’inserimento in orbita che il successivo atterraggio del lander si sono rivelati molto complessi e delicati.
Altre missioni, l’asteroide Bennu
La OSIRIS-Rex, una tra le sonde che hanno avuto più successo, ha richiesto parecchi mesi per compiere manovre relativamente semplici a distanza di milioni di km : ci sono voluti per esempio 20 giorni per l’esecuzione di flyby multipli a 7 km dalla superficie dell’asteroide Bennu, prima che i controllori della missione decidessero che la sonda potesse entrare in un’orbita sicura.
In questo caso l’asteroide ha una forma, se vista da lontano, molto più regolare, somigliando vagamente ad un diamante
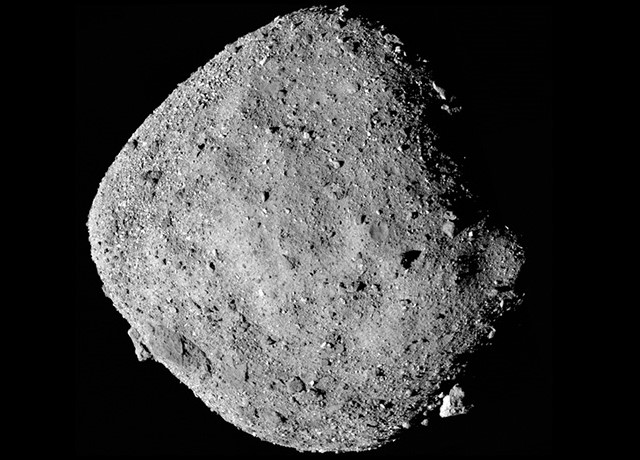
ma ancora una volta, visto da vicino
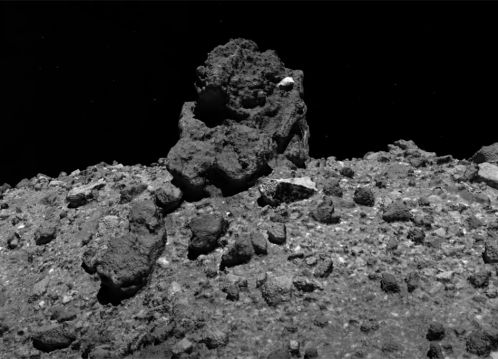
appare davvero molto complesso, con tantissime rocce di varie dimensioni.
Un altro problema…
… è rappresentato dal calcolo della costante gravitazionale dell’asteroide obiettivo della visita : la gravità è difficile da misurare da lontano ed un errore nel calcolo del suo valore ha infatti portato ai problemi del lander Philae.
A questo punto, può essere creato uno schema che possa risolvere questi problemi?
Nel pdf che si può scaricare a questo link, viene mostrato un diagramma di flusso con le decisioni da prendere in base a determinate situazioni. Tanto per dare un’idea questo è il diagramma, relativamente complesso
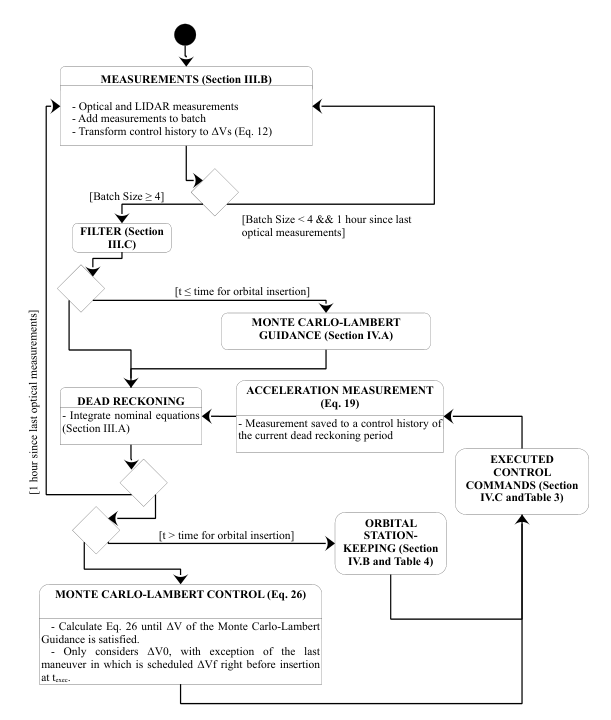
in cui a seguito del verificarsi di situazioni (i rombi del disegno con due possibili risposte) , il sistema a bordo della sonda decide di compiere certe azioni piuttosto che altre (i rettangoli che indicano le attività da svolgere in conseguenza della scelta).
In breve questo diagramma di flusso permetterebbe alla sonda di decidere cosa fare nella fase di avvicinamento all’obiettivo, rendendo minima la possibilità che si causino guasti nella sonda nel caso di elementi non previsti: in questo modo si abbatterebbe drasticamente l’impegno del controllo della missione nella fase di avvicinamento, limitando conseguentemente le comunicazioni tra il centro di controllo e la sonda stessa.
L’uovo di Colombo
Questo schema (ndr: che, ripeto, contiene la strategia di azioni da compiere in base al verificarsi di determinate circostanze) richiederebbe che la sonda sia equipaggiata da sensori onnipresenti e poco costosi che operino durante tutte le fasi del volo: un LiDAR simile a quello presente nelle autovetture a guida autonoma, una coppia di telecamere per avere una percezione della profondità con una visione stereoscopica ed un’unità di misura inerziale (IMU, Inertial Measurement Unit) che in ogni istante fornisca dati sull’orientamento, la velocità, l’accelerazione della sonda e del campo magnetico.
All’interno del pdf è spiegato con dovizia di termini matematici ed ingegneristici come questi apparati entrino in ballo in sede delle decisioni da prendere da parte del sistema di controllo della sonda ed alcune di queste attività da compiere prevedono calcoli statistici (il Metodo di Montecarlo indicato più volte nello schema) implementati con metodi di apprendimento tipici dell’Intelligenza Artificiale.
Per testare questo sistema, gli autori hanno eseguito delle simulazioni su due potenziali asteroidi obiettivo di passate missioni per verificare come potrebbe rispondere una nuova sonda in varie situazioni : per primo l’hanno infatti applicato ad una sonda simile alla OSIRIS-Rex con lo stesso obiettivo (l’asteroide Bennu) , proprio perché avevano a disposizione tutti i dati necessari calcolati in loco nel corso della missione vera.
Seguendo questo algoritmo di controllo la sonda potrebbe entrare in un’orbita a 2 km dalla superficie già dal primo giorno di avvicinamento ad una distanza di migliaia di km, per poi entrare nell’orbita definitiva ad 800 m di altezza appena il giorno dopo.
Il tutto si otterrebbe con una minima spinta e dunque un utilizzo limitato del carburante, ottenendo così benefici notevoli per missioni nello spazio profondo.
Un altro esempio di controllo è stato applicato ad una sonda il cui obiettivo è l’asteroide 433 Eros, che prima vediamo in alcune immagini.
L’asteroide 433 Eros
In questo caso si tratta di un asteroide NEO, obiettivo della sonda NEAR della NASA ed operativa a cavallo degli anni 2000: lanciata nel lontano 1996 la sonda aveva raggiunto l’asteroide dopo quattro anni ed è stata la prima sonda ad entrare in orbita ad un NEO.
Successivamente, nel 2001, aveva effettuato per la prima volta l’atterraggio sull’oggetto celeste, dopo un anno di osservazioni ravvicinate della superficie (da parte dei tecnici) per trovare il sito adatto all’atterraggio.
In questo caso, abbiamo un asteroide con una forma particolare, una specie di banana oppure una patata allungata

che in questa animazione
vediamo ruotare molto velocemente su se stesso.
Proprio la sua forma allungata ha rappresentato una bella sfida per l’effettuazione dell’atterraggio ed anche con l’utilizzo del sistema di controllo visto in precedenza, l’atterraggio stesso sarebbe comunque molto più complesso che non su un oggetto più regolare come Bennu.
Sarebbe necessario poi un utilizzo maggiore di spinte da parte dei motori e conseguente consumo di propellente, ma si sarebbero decisamente abbreviati i tempi della missione e l’ampiezza di banda richiesta per le comunicazioni con il centro di controllo.
In definitiva questi tipi di sistemi di controllo autonomo prenderanno sempre più piede sia sulla Terra che nello spazio: studi come questi possono indicare la strada da percorrere.
L’idea base, come visto, è di eliminare mesi di lavoro manuale da parte dei tecnici inserendo all’interno della sonda una manciata di sensori ed implementando ogni volta nuovi algoritmi di controllo che sfrutti questi strumenti di bordo. E si spera che le agenzie e compagnie che hanno l’obiettivo di raggiungere un asteroide possano in breve tempo sfruttare questo tipo di algoritmi di controllo.
Commenta per primo!
Aggiungi un Commento